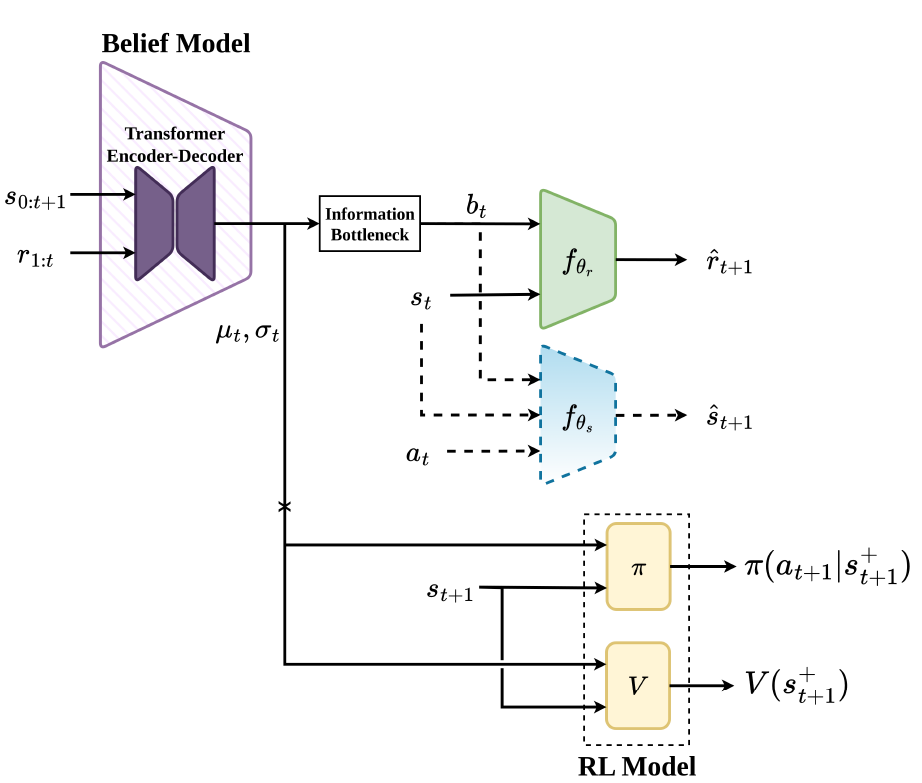
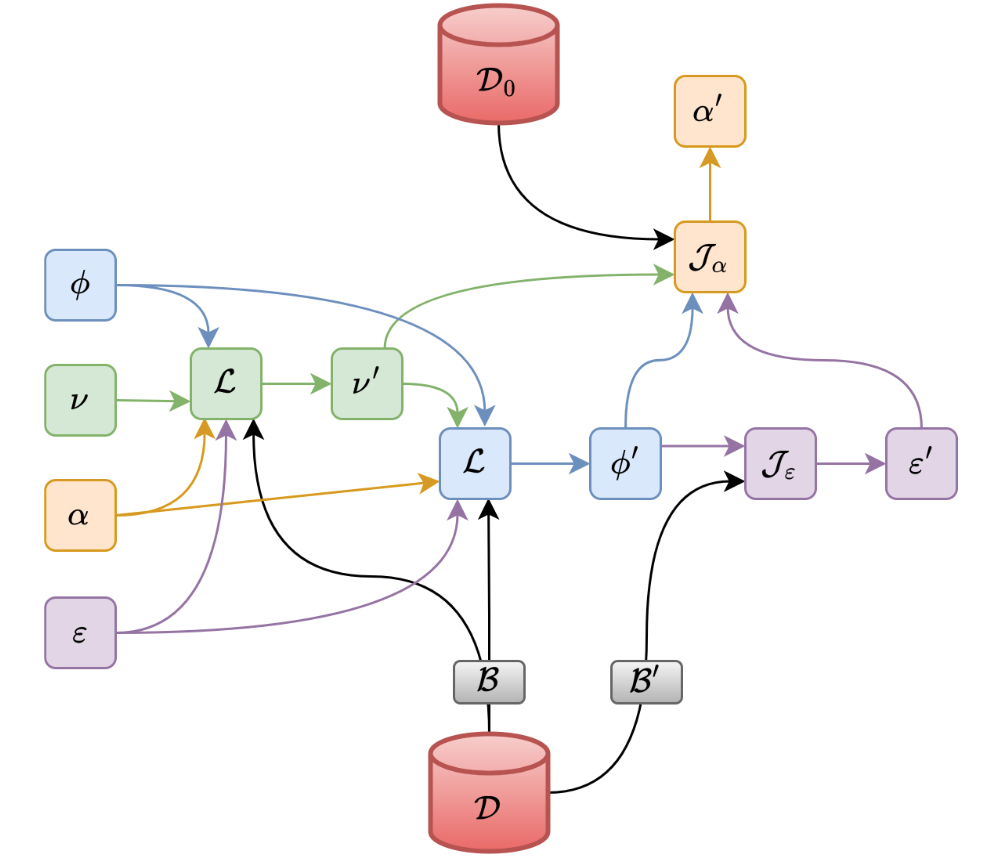
Context Representation via Action-Free Transformer Encoder-Decoder for Meta Reinforcement Learning
A. M. S. Enayati, H. Honari, K. Gupta, and H. Najjaran.
arXiv preprint

AI and Robotics Researcher (Ph.D., Robotics) with expertise in reinforcement learning, generative models, and intelligent control for industrial systems. Experienced in developing and deploying ML-based decision-making frameworks, Sim2Real transfer, and advanced model-based control. Strong background in machine learning pipelines, robotic simulation, and system integration.
Context Representation via Action-Free Transformer Encoder-Decoder for Meta Reinforcement Learning
A. M. S. Enayati, H. Honari, K. Gupta, and H. Najjaran.
arXiv preprint
A Cross-Environment and Cross-Embodiment Path Planning Framework via a Conditional Diffusion Model
M. G. Tamizi, H. Honari, A. M. S. Enayati, A. Nozdryn-Plotnicki, and H. Najjaran.
arXiv preprint

Hit Expansion via Localized Exploration of Synthesizable Chemical Space
Y. Jin, W. Virany, A. Lian, A. M. S. Enayati, P. Gaiński, and M. Koziarski
ICLR 2026 Workshop on Generative and Experimental Perspectives for Biomolecular Design
Sample-Efficient Reinforcement Learning with Symmetry-Guided Demonstrations for Robotic Manipulation
A. M. S. Enayati, Z. Zhang, K. Gupta, and H. Najjaran.
Springer Neural Computing & Applications
Using Implicit Behavior Cloning and DMP for Robot Motion Planning
Z. Zhang, J. Hong, A. M. S. Enayati, and H. Najjaran.
IEEE Transactions on Robotics
Meta SAC-Lag: Towards Deployable Safe Reinforcement Learning
H. Honari, A. M. S. Enayati, M. G. Tamizi, and H. Najjaran.
IEEE IROS 2024
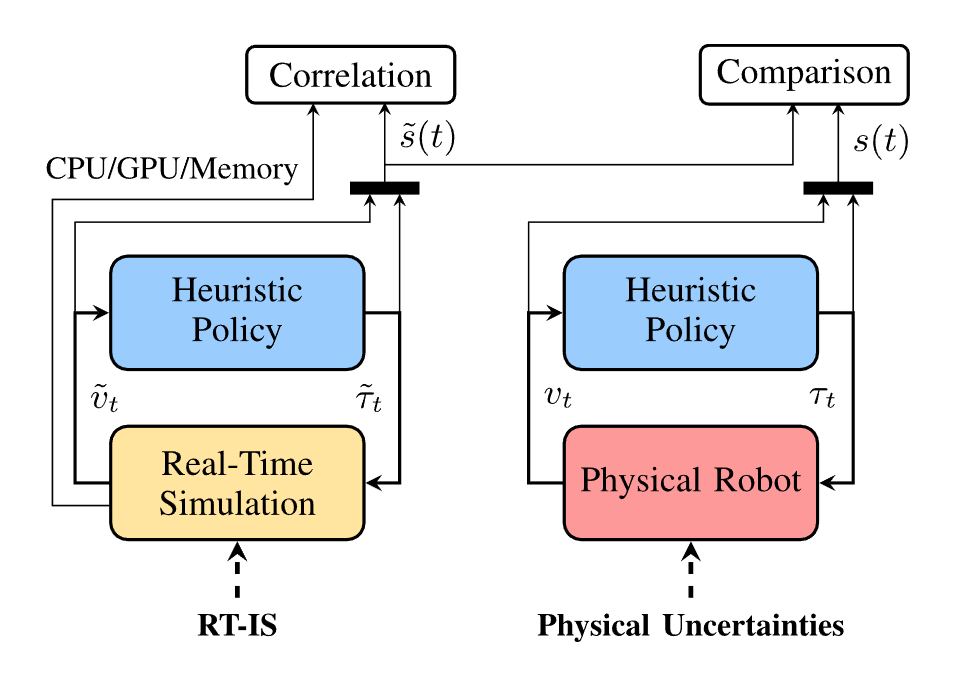
Facilitating Sim-to-Real via Intrinsic Stochasticity
A. M. S. Enayati, R. Dershan, Z. Zhang, D. Richert, and H. Najjaran.
IEEE Transactions on AI
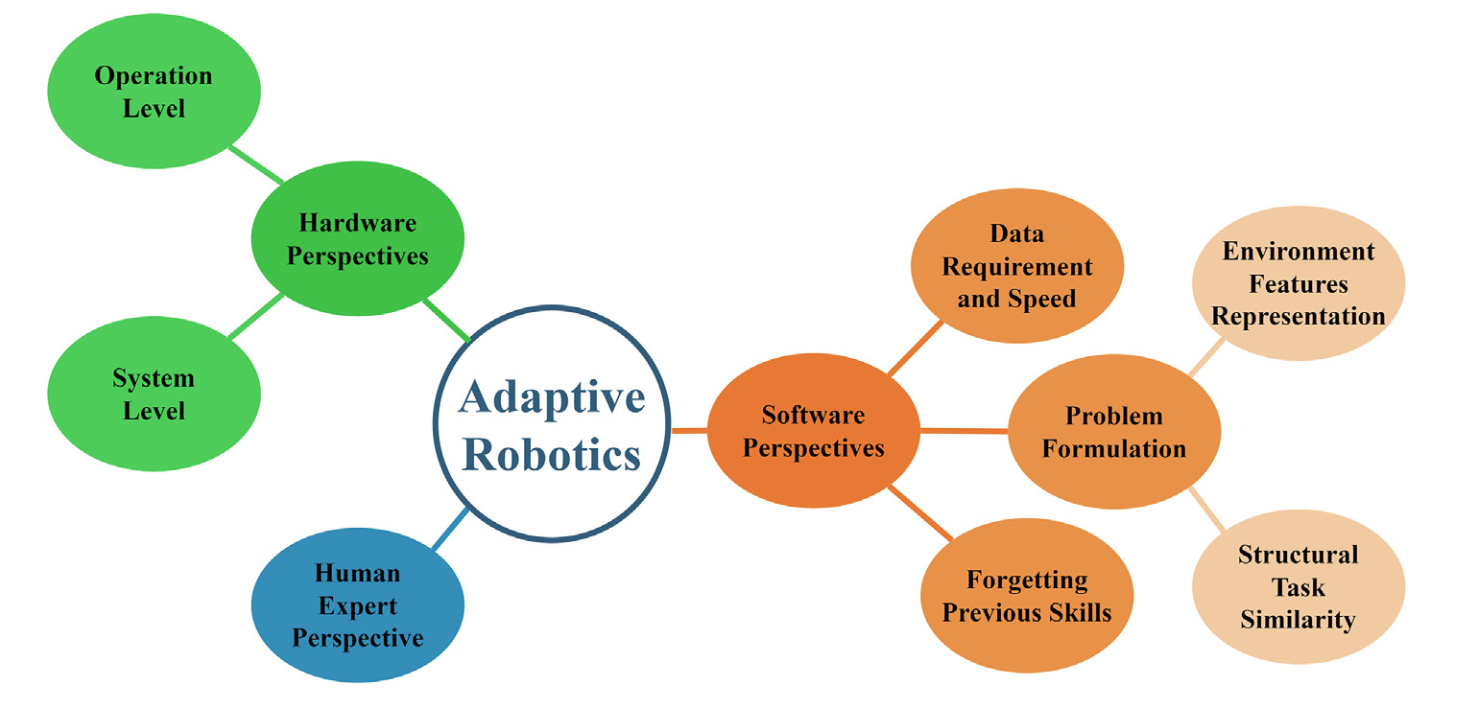
A Methodical Interpretation of Adaptive Robotics
A. M. S. Enayati, Z. Zhang, H. Najjaran.
Neurocomputing, 2022
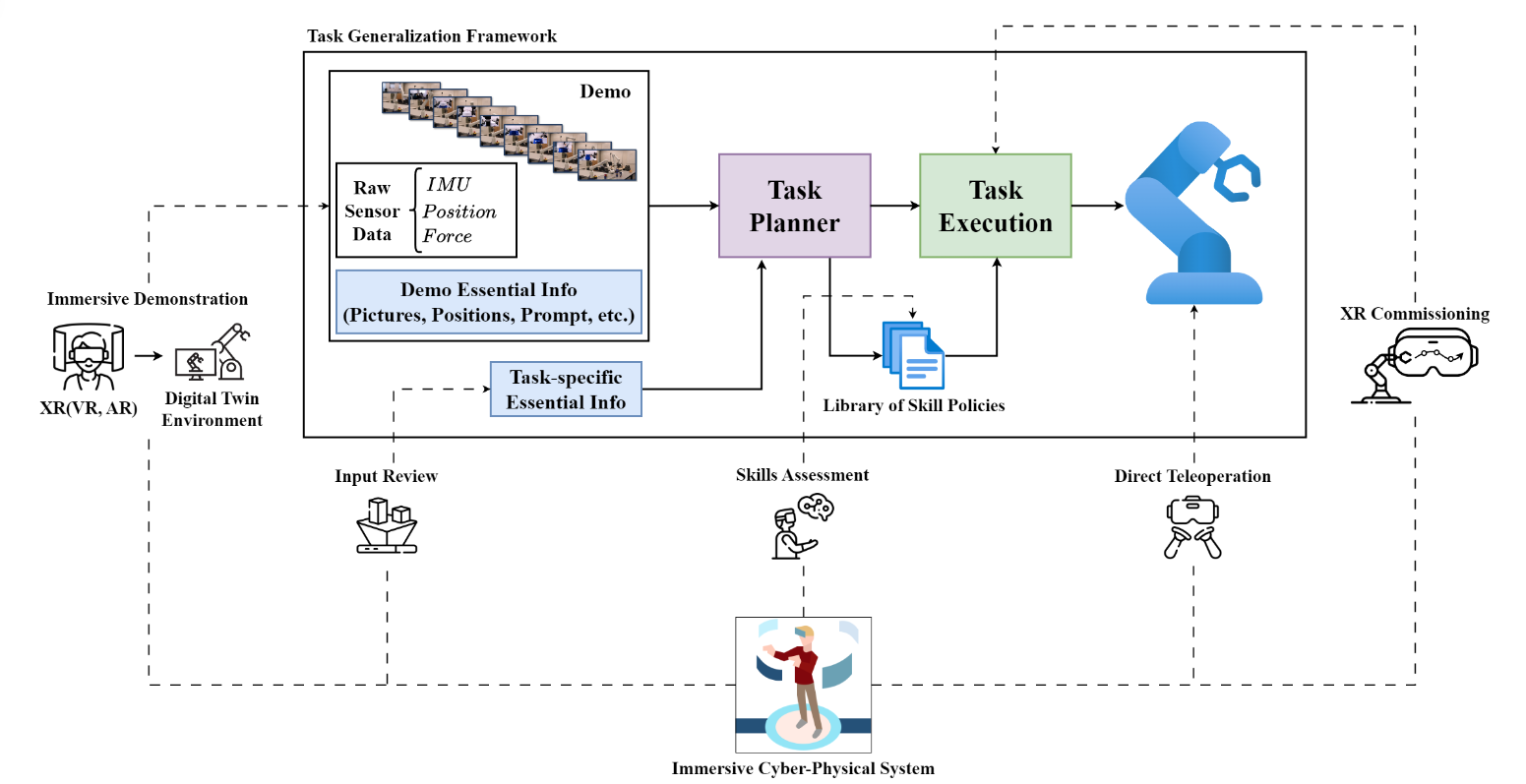
Extended Reality for Enhanced Human-Robot Collaboration
Y. Karpichev, T. Charter, J. Hong, A. M. S. Enayati, H. Honari, M. G. Tamizi, and H. Najjaran.
IEEE ROMAN 2024
Visual Deformation Detection Using Soft Simulation
J. Sol, A. M. S. Enayati, and H. Najjaran.
IEEE CASE 2024
Ego-Motion Aware Target Prediction for Multi-Object Tracking
N. Mahdian, M. Jani, A. M. S. Enayati, and H. Najjaran.
arXiv